ニュース
コメント:STのVL53L1X距離センサーによる距離の測定

「カラー」画像の作成は新しいものではありません。マイクロソフト社のKinectセンサーは、STマイクロエレクトロニクスがレーザベースの距離センサーモノリスを使って管理できるトリックで、着陸センサー、距離感知型イグナイターなどの装飾品に理想的です。
オールインワン...
Kinectで使用されるセンサーとは異なり、STのセンサーは「1次元」です。チップ上部の光学窓はファインダとエミッタとして機能し、検出器の前にある「物体」までの距離は1次元の値として返されます(何かが私から50cm離れていると思います)。
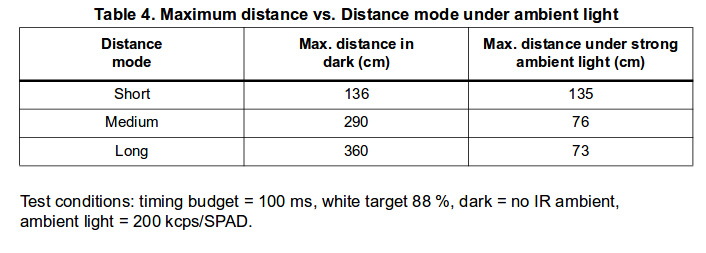
さらに、レーザー技術を使用することで、システムはターゲット材料とほとんど完全に独立しています。古典的な赤外線コンポーネントから知られている色に関する問題はここでは発生しません。
悲しいことに、STはアドレスセレクタを公開しないため、バスコントローラごとに1つのセンサに制限されます。実際の通信プロトコルは別の文書で説明されています.STはURLスキームを変更するのが大好きです。 UM2356 それを見つけるには - (ハードウェアのアドレスセレクタを公開しないで、センサの起動時にコマンドでアドレスを選択することが可能です)、Martin Palsson氏のコメントによれば、詳細が記載されています(スクロールダウン)。
さらに、Cで書かれたドライバは、実装者を助けるために利用可能になります。
アクティブ時の消費電流は20mA未満の範囲で緩やかですが、3V5の最大電源電圧に注意する必要があります。これにより、システムを5VのI2Cバスに統合するのが困難になります.2つのFETで構成されるレベルシフタが回避策です directionalLevelShifterそして アプリケーションノート)。
私を校正する!
ほとんどのセンサーはケースデザインの変更を必要とします。「外から見える」カットアウトなしでは、あらゆる種類の奇妙な問題が発生します。 STは専用較正ルーチンを使用してこれを簡素化します。これは工場内のすべてのユニットで実行する必要があります。これはまた、「ウィンドウ」内の個々の光学的な差異を取り除き、リフローによる変化を考慮に入れます。
もう一つの素晴らしい点は、「関心領域」を設定できることです。視野は、デフォルトではかなり広いが、光学アレイはそれを制限するように調整することができる。上記のKinectとの類似点では、検出範囲も「クラス」で指定されています。
この部分の唯一の欠点は、非常に小さいフットプリントです。 STは、4.9×2.5×1.56mmの小さい非リードケース(Optical LGA)を使用しています。パッケージを簡単にリフローすることができますが、はんだ付けステーションを使用して試作品にフィッティングすることは不可能です。
すべての新しいチップと同様に、可用性が問題です。 OEMセールでは、価格は小額で2.8ユーロから5ユーロです。いつものように価格比較はあなたの財布の友達です。下記参照!
Ing。 Tam HANNAはPIC 16F84Aが暑い頃から埋め込みスペースで働いていました。数年のモバイルコンピューティングの後、コンサルティング会社のTamoggemon Holding k.s.ハードウェア設計に焦点を当てています。
も参照してください:ST ToFセンサーがFlightSense検出範囲を4mまで拡張